
Seminario Internacional: Robótica e Inteligencia Artificial para promover espacios bio-seguros en la pandemia COVID-19
Evento virtual en inglés
De 9:00 a 11:30 a.m.

Evento virtual en inglés
De 9:00 a 11:30 a.m.
Lo invitamos a nuestro seminario virtual en el cual buscamos incentivar el uso y desarrollo de soluciones robóticas como herramientas que promueven espacios bioseguros durante la pandemia por COVID-19.
En esta oportunidad, se difundirán los desarrollos obtenidos con el proyecto COVIBOT y sus colaboradores internacionales.
¡No se pierda de esta oportunidad para escuchar a nuestros invitados en vivo!

En este Seminario Internacional les vamos a compartir los desarrollos obtenidos durante la ejecución del proyecto COVIBOT, así como también presentar los avances y líneas de trabajo de los grupos de investigación que forman parte de la red.

El profesor Subramanian Ramamoorthy ocupa una cátedra personal de aprendizaje y autonomía de robots en la Escuela de Informática de la Universidad de Edimburgo, donde también es director del Instituto de Percepción, Acción y Comportamiento. Es miembro del Comité Ejecutivo del Centro de Robótica de Edimburgo y Turing Fellow del Instituto Alan Turing. Se doctoró en Ingeniería Eléctrica e Informática por la Universidad de Texas en Austin en 2007. Ha sido elegido miembro de la Academia Joven de Escocia en la Real Sociedad de Edimburgo, y profesor visitante en la Universidad de Stanford y en la Universidad de Roma "La Sapienza". Entre 2017 y 2020, ocupó el cargo de Vicepresidente de Predicción y Planificación en FiveAI, una empresa emergente con sede en el Reino Unido que desarrolla tecnología para vehículos autónomos. Sigue participando en la empresa como asesor científico. Su investigación se centra en el aprendizaje de los robots y la toma de decisiones en condiciones de incertidumbre, con especial énfasis en lograr una autonomía segura y robusta en entornos centrados en el ser humano. Su trabajo ha recibido financiación de diversas fuentes, como el EPSRC, la Comisión Europea (FP7, H2020), DARPA, DSTL y RAEng. Es el IP del nodo de investigación del UKRI sobre gobernanza y regulación de sistemas autónomos de confianza.

El Dr. Marcelo Becker nació en Brasil. Recibió el título de Ingeniero Mecánico con énfasis en Mecatrónica en 1993 en la Universidad de São Paulo (USP), Brasil. Posteriormente, recibió los títulos de magíster en ciencia y doctor en ciencia en ingeniería mecánica en 1997 y 2000, respectivamente, de la Universidad Estatal de Campinas, Brasil. Durante sus estudios de doctor en ciencia, pasó 8 meses como estudiante invitado en el Instituto de Robótica (IfR) del Instituto Federal Suizo de Tecnología en Zurich (ETHZ). De agosto de 2005 a julio de 2006 hizo un año sabático en el Laboratorio de Sistemas Autónomos (ASL) en Instituto Federal Suizo de Tecnología en Lausana (EPFL). Desde 2001 hasta 2008 fue profesor asociado en la Pontificia Universidad Católica de Minas Gerais, Brasil. De 2002 a 2005 también fue co-director del Departamento de Ingeniería Mecatrónica y del Grupo de Robótica y Automatización (GEAR) de la Pontificia Universidad Católica de Minas Gerais. Desde 2008, es profesor de la Universidad de São Paulo (CESE-USP). Ha publicado más de 100 artículos en los campos de la dinámica vehicular, el diseño mecánico y la robótica móvil en varias conferencias y revistas. Sus intereses de investigación son los robots móviles para la agricultura, los robots de inspección, la dinámica vehicular, las metodologías y herramientas de diseño, el diseño mecánico aplicado a los robots y la mecatrónica.

El Dr. Ricardo Carelli nació en San Juan, Argentina. Obtuvo el doctorado en Ingeniería Eléctrica en la Universidad Nacional Autónoma de México (UNAM) en 1989. Es profesor en la Universidad Nacional de San Juan y ha alcanzado la máxima categoría de Investigador Superior del Consejo Nacional de Investigaciones Científicas y Técnicas (CONICET). Ha sido director del Instituto de Automática de la Facultad de Ingeniería de la Universidad Nacional de San Juan desde 2008 hasta 2019. En 2012 bajo su gestión, el Instituto fue reconocido como Unidad de Doble Dependencia Universidad Nacional de San Juan y CONICET. El Dr. Carelli ha dictado numerosos cursos de posgrado tanto en su universidad como en universidades extranjeras en calidad de Profesor Invitado. Asimismo, ha asesorado 25 tesis doctorales y 13 tesis de maestría y dirigido numerosos investigadores. Ha dictado conferencias invitadas en universidades extranjeras y en congresos nacionales e internacionales de relevancia. Ha dictado conferencias invitadas en universidades extranjeras y en congresos nacionales e internacionales de relevancia. Cuenta con más de 115 publicaciones en revistas internacionales. El Dr. Carelli es miembro senior de IEEE y miembro vitalicio de la Asociación Argentina de Control Automático, AADECA-IFAC. Actualmente es Investigador Superior Contratado por el CONICET. Sus áreas de interés son: control de robots, sistemas de manufactura, control adaptable y técnicas de inteligencia artificial aplicadas al control automático.

Profesor Asistente del Programa de Ingeniería Biomédica de la Escuela Colombiana de Ingeniería Julio Garavito. Tiene un título de Ingeniero Electrónico de la Escuela Colombiana de Ingeniería Julio Garavito en Bogotá, Colombia.
También posee un título de especialista en gerencia de proyectos de la Escuela Colombiana de Ingeniería Julio Garavito. Y es Master en ingeniería biomédica de la Universidad Nacional de Entre Ríos, Argentina. Obtiene su título de Doctor en ingeniería eléctrica en el área de robótica en la Universidad Federal do Espírito Santo. Actualmente está realizando sus estudios postdoctorales en la Universidad Federal do Espírito Santo

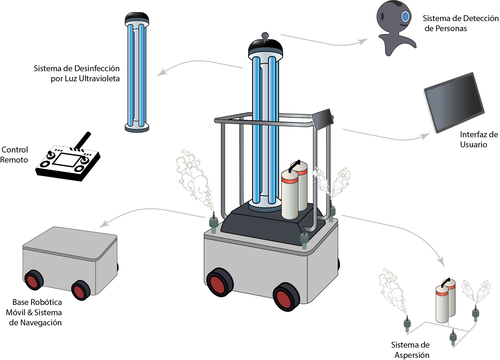
Esta charla tiene por objetivo presentar una plataforma de desinfección pasiva que fue desarrollada por estudiantes y profesores del centro en biomecatrónica de la Escuela Colombiana de Ingeniería Julio Garavito. La plataforma se compone de una lámpara UV y un sistema de atomización para las tareas de desinfección. En esta presentación se describirán los detalles del desarrollo electrónico y mecánico de la plataforma.

Esta charla tiene por objetivo presentar un sistema de software inteligente capaz de organizar y ejecutar tareas de desinfección en diferentes entornos. El sistema se compone de un algoritmo de priorización un sistema de navegación autónoma, los cuales se simularon e implementaron en un robot móvil. El sistema fue desarrollado por profesores y estudiantes del centro en biomecatrónica de la Escuela Colombiana de Ingeniería Julio Garavito.

Esta charla tiene por objetivo describir un algoritmo de aprendizaje profundo capaz de detectar el uso apropiado de tapabocas. El sistema se compone de un módulo de software y un robot social que brinda refuerzo cuando las personas utilizan apropiadamente el tapabocas. Adicionalmente, se presentará la comparación del algoritmo con otras estrategias disponibles en la literatura. El sistema fue desarrollado por profesores.y estudiantes del centro en biomecatrónica de la Escuela Colombiana de Ingeniería Julio Garavito.
Esta charla tiene por objetivo presentar los hallazgos de diferentes estudios ejecutados en entornos clínicos utilizando robots sociales durante la pandemia por COVID-19. Adicionalmente, se presentan los resultados de un estudio cualitativo llevado a cabo con profesionales de la salud, el cual buscó describir las opiniones y percepciones de los mismos ante el uso de herramientas robóticas para mitigar los impactos del COVID-19.
Esta charla presentará los desarrollos del grupo del Instituto de Automática de la Universidad Nacional de San Juan (Argentina). Tiene por objetivo describir el funcionamiento de una estrategia que utiliza robots autónomos para realizar tareas de desinfección precisa durante la pandemia por COVID-19
Grupo USP
Grupo UK
En la actualidad la pandemia por COVID-19 sigue siendo una preocupación sanitaria para múltiples países en Latinoamérica y el mundo entero. En particular, los adelantados procesos de vacunación, así como la reactivación económica y social han permitido el retorno a las actividades cotidianas en múltiples sectores de la sociedad. Sin embargo, para mantener los protocolos de bioseguridad durante este retorno y evitar el repunte de nuevos casos de contagio, se hace necesario implementar estrategias que permitan monitorear el comportamiento y seguridad de las personas.
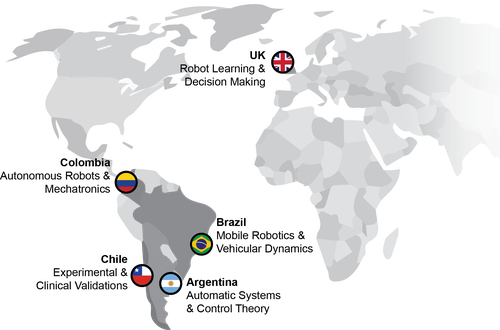
En este sentido, en el marco de las actividades del proyecto COVIBOT, financiado por la Real Academia de Ingeniería y la Escuela Colombiana de Ingeniería Julio Garavito, se han venido desarrollando diferentes estrategias robóticas, así como técnicas de aprendizaje automático y visión por computador para la promoción de espacios bioseguros. Así mismo, este proyecto ha permitido la formación de una red de investigación internacional entre investigadores de la Universidad de Edinburgh (Reino Unido), la Universidad Nacional de San Juan (Argentina), la Universidad de São Paulo (Brasil) y la Escuela Colombiana de Ingeniería (Colombia).
De acuerdo a lo anterior, este seminario será el evento de cierre del proyecto COVIBOT y busca divulgar los desarrollos obtenidos durante la ejecución del proyecto ante la comunidad, así como también presentar los desarrollos y líneas de trabajo de los grupos de investigación que forman parte de la red.



